Содержание
- Programmable Automation Controller (PAC)
- DCS PLC
- Programmable Logic Controller (PLC)
- Motion Controller
- Safety PLC
- Remote Terminal Unit (RTU)
- PC-based PLC
- OPLC
- Logic Relay
- Принцип работы ПЛК
- Выбор ПЛК
- Программируемые логические контроллеры
- 35) Для чего нужны контроллеры и каковы их функции?
- Зачем нужен контроллер
ПЛК — программируемые логические контроллеры (промышленные контроллеры).
Programmable Automation Controller (PAC)
Контроллеры для автоматизации крупных дискретно-непрерывных производств на базе открытых стандартов и сети Industrial Ethernet.
DCS PLC
ПЛК в составе распределённых систем управления (РСУ) для автоматизации крупных опасных непрерывных производств с резервированием ЦПУ, модулей ввода-вывода, блоков питания и полевых шин.
Programmable Logic Controller (PLC)
Программируемые логические контроллеры для автоматического управления преимущественно дискретными операциями (упаковка, инструментальная обработка, конвейерные системы, сборка и т. п.).
Large PLC
ПЛК для автоматизации крупных дискретных производств.
Small PLC
ПЛК для автоматизации небольших производств, OEM-производителей автоматических линий и технологических установок.
NC-based PLC
ПЛК в станках с ЧПУ (в конструктиве стойки ЧПУ).
Motion Controller
Контроллеры для управления сервоприводами в системах управления движением: ЧПУ, контурное управление, позиционирование, синхронизация скорости и положения (электронный редуктор).
PLC-based Motion Controller
Контроллер движения в конструктиве ПЛК.
Drive-based Motion Controller
Контроллер движения в конструктиве сервопривода.
NC-based Motion Controller
Контроллер движения в конструктиве стойки ЧПУ.
Safety PLC
Large Safety PLC
Контроллеры для ПАЗ опасных непрерывных производств.
Small Safety PLC
Контроллеры в системах приборной безопасности травмоопасных машин, представляющих угрозу здоровью и жизни персонала (прессы, станки, роботы и т.п.).
Remote Terminal Unit (RTU)
Управляемые по радиоканалам телеметрические контроллеры для автоматизации удалённо расположенных объектов (компрессорные станции, скважины, канализационные насосные станции и т. п.).
PC-based PLC
ПК-совместимые контроллеры.
Soft-PLC
Программа, реализующий функции ПЛК на базе ПК:
- Включает PLC систему реального времени
- Может инсталлироваться на любой ПК с установленной коммуникационной картой для связи с удалёнными входами-выходами (Remote I/O) или картой входов-выходов (PC-based I/O)
- Использует рабочую память ПК
- Для сложных задач управления программа может разрабатываться на C/C++ и встраиваться в цикл PLC
Slot-PLC
ПЛК в формате PC-card (PCI, ISA):
- Устанавливается в свободный слот ПК
- Запитывается от ПК, но имеет вход для подключения ИБП
- Имеет встроенную память и слот для расширения памяти
- Буферная батарейка защищает данные оперативной памяти
- Работает независимо от CPU компьютера
- Имеет выход на промышленную шину, может использовать стандартные модули удалённого ввода-вывода
- Имеет встроенную PLC систему реального времени
- Может иметь в комплекте OPC-сервер для связи с PC
- Может иметь в комплекте софт HMI
OPLC
Два-в-одном: PLC + OP в одном корпусе (контроллер в конструктиве операторской панели).
Logic Relay
Интеллектуальные программируемые реле – микроконтроллеры для простейших задач релейной логики (таймеры, часы реального времени, счётчики, компараторы, булевские операции) с ограниченным функционалом (память, количество дискретных входов-выходов, расширяемость, коммуникабельность).
Принцип работы ПЛК
ПЛК предназначены для автоматического управления дискретными и непрерывными технологическими процессами.
Основные принципы работы ПЛК:
- Цикличность
- Работа в реальном масштабе времени, обработка прерываний
Цикличность работы ПЛК
В одном цикле ПЛК последовательно выполняет следующие задачи:
- Самодиагностика
- Опрос датчиков, сбор данных о текущем состоянии технологического процесса
- Обмен данными с другими ПЛК, промышленными компьютерами и системами человеко-машинного интерфейса (HMI)
- Обработка полученных данных по заданной программе
- Формирование сигналов управления исполнительными устройствами
Время цикла
Время выполнения одного цикла программы зависит от:
- размера программы
- количества удалённых входов-выходов
- скорости обмена данными с распределённой периферией
- быстродействия ЦПУ
Время цикла (время квантования) должно быть настолько маленьким, чтобы ПЛК успевал за скоростью изменения переменных процесса (см. теорию автоматического управления), в противном случае процесс станет неуправляемым.
Watchdog
Строжевой таймер следит за тем, чтобы время цикла не превышало заданное.
Обработка прерываний
По прерываниям ПЛК запускает специальные программы обработки прерываний.
Типы прерываний:
- Циклические прерывания по времени (например, каждые 5 секунд)
- Прерывание по дискретному входу (например, по сработке концевика)
- Прерывания по программным и коммуникационным ошибкам, превышению времени цикла, неисправностям модулей, обрывам контуров
Модули ПЛК
- Корзина для установки модулей
- Стабилизированный блок питания AC/DC (~220В/=24В)
- Центральное процессорное устройство (ЦПУ) с интерфейсом для подключения программатора, переключателем режимов работы, индикацией статуса, оперативной (рабочей) памятью, постоянной памятью для хранения программ и блоков данных
- Интерфейсные модули для подключения корзин расширения локального ввода-вывода и распределённой периферии
- Коммуникационные модули для обмена данными с другими контроллерами и промышленными компьютерами
- Модули ввода-вывода
- Прикладные модули (синхронизация, позиционирование, взвешивание и т.п.)
Функции устройств ввода
- Электрическое подключение и питание технологических датчиков (дискретных и аналоговых)
- Диагностика состояния (обрыв провода, контроль граничных значений, короткое замыкание и т.п.)
- Формирование цифровых значений (машинных слов) технологических параметров
- Передача этих данных в память ПЛК для дальнейшей обработки
Функции устройств вывода
- Электрическое подключение исполнительных устройств
- Диагностика состояния (обрыв провода, контроль граничных значений, короткое замыкание и т.п.)
- Приём управляющих машинных слов из памяти ПЛК
- Формирование управляющих сигналов (дискретных и аналоговых)
Типы устройств ввода-вывода
- Модули локального ввода-вывода располагаются:
- в одной корзине с ЦПУ
- в соседних корзинах в одном шкафу с ЦПУ
- в корзинах в соседних шкафах в одном помещении с ЦПУ
- Модули распределённого ввода-вывода (децентрализованная периферия) располагаются удалённо (в другом здании или в поле по по месту управления) и связываются с ЦПУ по промышленной полевой шине. Станции удалённого ввода-вывода могут иметь взрывозащищённое исполнение или повышенный класс защиты корпуса (например, IP67) и устанавливаться без шкафа
Функции коммуникационных модулей
Коммуникационные модули предназначены для обмена данными:
- с удалёнными модулями ввода-вывода (Profibus, Modbus и др.)
- с программаторами, панелями оператора (HMI) и другими контроллерами
- с полевыми устройствами (HART, Foundation Fieldbus и др.)
- с сервоприводами (SERCOS)
- с промышленными компьютерами верхнего уровня (Industrial Ethernet и др.)
- по радиоканалам (GSM, GPRS)
- по телефонным линиям
- по Internet (встроенные web-серверы публикуют на своих страницах статусную информацию)
Выбор ПЛК
Выбор платформы автоматизации
Выбор платформы определяет и весь ваш будущий выбор.
ПЛК является первым пунктом в выборе платформы.
Правильный выбор платформы позволяет минимизировать расходы жизненного цикла системы управления:
- склад запасных частей и сервисное обслуживание
- обучение и сертификацию обслуживающего персонала
- приобретение лицензий на средства разработки прикладного ПО
- интеграцию (бесшовная интеграция)
- миграцию (переход со старого оборудования на новое)
- программы и сикдки для ключевых клиентов
Определение количества точек ввода-вывода
Желательно максимально точно определить общее количество точек ввода-вывода (с учётом резервирования), чтобы подобрать ПЛК соответствующей производительности, или заранее предусмотреть модель контроллера с большим запасом по расширяемости.
- Дискретные входы (стандартные и быстродействующие импульсные)
- Аналоговые входы для подключения датчиков:
- токовых (0..20мА, 4..20мА)
- «напряженческих» (-10..+10В, 0..+10В)
- термопар и термосопротивлений (способ подключения: 2-х, 3-х или 4-х проводное подключение)
- Дискретные выходы (мокрый контакт)
- Релейные выходы (сухой контакт):
- тип нагрузки (резистивная, индуктивная, резистивно-индуктивная)
- величина тока (в Амперах)
- напряжение (~220В, =24В)
- Аналоговые выходы:
- токовые (0..20мА, 4..20мА)
- «напряженческие» (-10..+10В, 0..+10В)
- Интерфейсы для подключения угловых или линейных датчиков скорости, положения (энкодеров, резольверов, синусно-косинусных)
Определение архитектуры системы управления
- Составить список объектов автоматизации (производственных площадок, цехов, участков, технологических линий, подсистем)
- Определиться с количеством ПЛК: если объекты управляются независимо друг от друга и вводятся в эскплуатацию поочередно, то можно предусмотреть для них отдельные контроллеры
- В зависимости от объёма и скорости обмена данными, территориального расположения объектов управления необходимо выбрать тип и топологию промышленной сети, требуемое коммуникационное оборудование
- Для минимизации длины кабельных соединений используются станции распределённого ввода-вывода
- Расписать точки ввода вывода по контроллерам, шкафам локального и децентрализованного ввода-вывода, определить количество и типы модулей ввода-вывода с учётом запаса по свободным каналам ввода-вывода
- В зависимости от направления обмена данными между ПЛК необходимо правильно выбрать конфигурацию Master – Slave (Ведущий – Ведомый): контроллеры типа Slave не могут обмениваться данными друг с другом
Масштабируемость
Масштабируемость – это возможность подобрать промышленный контроллер оптимальной конфигурации под конкретную задачу (не переплачивая за избыточную функциональность), а при необходимости расширения – просто добавить недостающие модули без замены старых.
Выбор блоков питания
Контроллеры подключаются к стабилизированным импульсным источникам питания. Необходимо аккуратно подсчитать суммарный ток, потребляемый всеми модулями контроллера и подобрать блок питания с соответствующей нагрузочной способностью.
Пример последствий неправильного выбора блока питания
Выходные модули установки приготовления клея для варки целлюлозы иногда отключались и испорченный клей приходилось выбрасывать тоннами. К финскому проекту ни у кого претензий не возникало. Заменили все модули ввода-вывода — не помогло. Грешили на случайные помехи из-за плохого заземления. Оказалось, что в определённых ситуациях (как-бы случайно) срабатывало такое «большое» количество входов и выходов, что суммарный потребляемый ими ток на мгновение превышал допустимый выходной ток блока питания и модули вывода отключались. Заменили блок питания на более мощный и проблема была решена.
Программное обеспечение
- Очень полезен программный симулятор, с помощью которого можно отладить программу без подключения к ПЛК
- Удобно, если для программирования ПЛК можно использовать стандартный ноутбук и стандартный кабель (USB или Ethernet)
- Проще найти программиста, если контроллер поддерживает стандартные языки программирования IEC61131:
- LD (Ladder Diagram) – графический язык релейной логики
- IL (Instruction List) – список инструкций
- FBD (Function Block Diagram) – графический язык диаграмм логических блоков
- SFC (Sequential Function Chart) – графический язык диаграмм состояний
- ST (Structured Text) – текстовый язык программирования высокого уровня
Программируемые логические контроллеры
Структура и устройство ПЛК
С чего начиналась промышленная автоматика? А начиналось все с контактно-релейных схем управления промышленными процессами. Кроме жуткого «шелестения», контактно релейные схемы имели фиксированную логику работы, и в случае изменения алгоритма, необходимо основательно переделать монтажную схему
Бурное развитие микропроцессорной техники, привели к созданию систем управления технологическими процессами на базе промышленных контроллеров. Но это не означает, что реле изжили себя, у них просто своя ниша для применения.
ПЛК – программируемый логический контроллер, представляют собой микропроцессорное устройство, предназначенное для сбора, преобразования, обработки, хранения информации и выработки команд управления, имеющий конечное количество входов и выходов, подключенных к ним датчиков, ключей, исполнительных механизмов к объекту управления, и предназначенный для работы в режимах реального времени.

Принцип работы ПЛК несколько отличается от «обычных» микропроцессорных устройств. Программное обеспечение универсальных контроллеров состоит из двух частей. Первая часть это системное программное обеспечение. Проводя аналогию с компьютером можно сказать, что это операционная система, т.е. управляет работой узлов контроллера, взаимосвязи составляющих частей, внутренней диагностикой. Системное программное обеспечение ПЛК расположено в постоянной памяти центрального процессора и всегда готово к работе. По включению питания, ПЛК готов взять на себя управление системой уже через несколько миллисекунд. ПЛК работают циклически по методу периодического опроса входных данных.
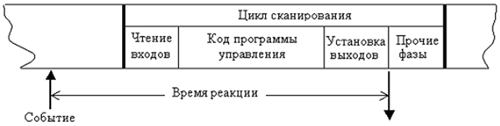
Рабочий цикл ПЛК включает 4 фазы:
1. Опрос входов
2. Выполнение пользовательской программы
3. Установку значений выходов
4. Некоторые вспомогательные операции (диагностика, подготовка данных для отладчика, визуализации и т. д.).
Выполнение 1 фазы обеспечивается системным программным обеспечением. После чего управление передается прикладной программе, той программе, которую вы сами записали в память, по этой программе контроллер делает то что вы пожелаете, а по ее завершению управление опять передается системному уровню. За счет этого обеспечивается максимальная простота построения прикладной программы – ее создатель не должен знать, как производится управление аппаратными ресурсами. Необходимо знать с какого входа приходит сигнал и как на него реагировать на выходах
Очевидно, что время реакции на событие будет зависеть от времени выполнения одного цикла прикладной программы. Определение времени реакции – времени от момента события до момента выдачи соответствующего управляющего сигнала – поясняется на рисунке:
Обладая памятью, ПЛК в зависимости от предыстории событий, способен реагировать по-разному на текущие события. Возможности перепрограммирования, управления по времени, развитые вычислительные способности, включая цифровую обработку сигналов, поднимают ПЛК на более высокий уровень в отличие от простых комбинационных автоматов.
Рассмотрим входа и выхода ПЛК. Существует три вида входов дискретные, аналоговые и специальные
Один дискретный вход ПЛК способен принимать один бинарный электрический сигнал, описываемый двумя состояниями – включен или выключен. Все дискретные входы (общего исполнения) контроллеров обычно рассчитаны на прием стандартных сигналов с уровнем 24 В постоянного тока. Типовое значение тока одного дискретного входа (при входном напряжении 24 В) составляет около 10 мА.
Аналоговый электрический сигнал отражает уровень напряжения или тока, соответствующий некоторой физической величине, в каждый момент времени. Это может быть температура, давление, вес, положение, скорость, частота и т. д.
Поскольку ПЛК является цифровой вычислительной машиной, аналоговые входные сигналы обязательно подвергаются аналого-цифровому преобразованию (АЦП). В результате, образуется дискретная переменная определенной разрядности. Как правило, в ПЛК применяются 8 — 12 разрядные преобразователи, что в большинстве случаев, исходя из современных требований по точности управления технологическими процессами, является достаточным. Кроме этого АЦП более высокой разрядности не оправдывают себя, в первую очередь из-за высокого уровня индустриальных помех, характерных для условий работы контроллеров.
Практически все модули аналогового ввода являются многоканальными. Входной коммутатор подключает вход АЦП к необходимому входу модуля.
Стандартные дискретные и аналоговые входы ПЛК способны удовлетворить большинство потребностей систем промышленной автоматики. Необходимость применения специализированных входов возникает в случаях, когда непосредственная обработка некоторого сигнала программно затруднена, например, требует много времени.
Наиболее часто ПЛК оснащаются специализированными счетными входами для измерения длительности, фиксации фронтов и подсчета импульсов.
Например, при измерении положения и скорости вращения вала очень распространены устройства, формирующие определенное количество импульсов за один оборот – поворотные шифраторы. Частота следования импульсов может достигать нескольких мегагерц. Даже если процессор ПЛК обладает достаточным быстродействием, непосредственный подсчет импульсов в пользовательской программе будет весьма расточительным по времени. Здесь желательно иметь специализированный аппаратный входной блок, способный провести первичную обработку и сформировать, необходимые для прикладной задачи величины.
Вторым распространенным типом специализированных входов являются входы способные очень быстро запускать заданные пользовательские задачи с прерыванием выполнения основной программы – входы прерываний.
Дискретный выход также имеет два состояния – включен и выключен. Они нужны для управления: электромагнитных клапанов, катушек, пускателей, световые сигнализаторы и т.д. В общем сфера их применения огромна, и охватывает почти всю промышленную автоматику.
Конструктивно ПЛК подразделяются на моноблочные, модульные и распределенные. Моноблочные имеют фиксированный набор входов выходов

В модульных контроллерах модули входов – выходов устанавливаются в разном составе и количестве в зависимости от предстоящей задачи

В распределенных системах модули или даже отдельные входа-выхода, образующие единую систему управления, могут быть разнесены на значительные расстояния
Языки программирования ПЛК
При создании системы управления технологического процесса, всегда существует проблема по взаимопониманию программиста и технологов. Технолог скажет «нам надо немного подсыпать, чуть подмешать, еще подсыпать и чуть нагреть». И мало когда следует ждать от технолога формализованного описания алгоритма. И получалось так, что программисту нужно долго вникать в тех. Процесс, потом писать программу. Зачастую при таком подходе программист остается единственным человеком, способным разобраться в своем творении, со всеми вытекающими отсюда последствиями. Такая ситуация породила стремлении создание технологических языков программирования, доступные инженерам и технологам и максимально упрощающим процесс программирования
За последнее десятилетие появилось несколько технологических языков. Более того, Международной Электротехнической Комиссией разработан стандарт МЭК-61131-3, концентрирующий все передовое в области языков программирования для систем автоматизации технологических процессов. Этот стандарт требует от различных изготовителей ПЛК предлагать команды, являющиеся одинаковыми и по внешнему виду, и по действию.
Стандарт специфицирует 5 языков программирования:
- Sequential Function Chart (SFC) – язык последовательных функциональных блоков;
- Function Block Diagram (FBD) – язык функциональных блоковых диаграмм;
- Ladder Diagrams (LАD) – язык релейных диаграмм;
- Statement List (STL) – язык структурированного текста, язык высокого уровня. Напоминает собой Паскаль
- Instruction List (IL) – язык инструкций., это типичный ассемблер с аккумулятором и переходам по метке.
Язык LAD или KOP (с немецкого Kontaktplan) похожи на электрические схемы релейной логики. Поэтому инженерам не знающим мудреных языков программирования, не составит труда написать программу. Язык FBD напоминает создание схем на логических элементах. В каждом из этих языков есть свои минусы и плюсы. Поэтому при выборе специалисты основываются в основном на личном опыте. Хотя большинство программных комплексов дают возможность переконвертировать уже написанную программу из одного языку в другой. Так как некоторые задачи изящно и просто решаются на одном языке, а на другом придется столкнуться с некоторыми трудностями
Наибольшее распространение в настоящее время получили языки LAD, STL и FBD.
Большинство фирм изготовители ПЛК традиционно имеют собственные фирменные наработки в области инструментального программного обеспечения. Например такие как «Concept» Schneider Electric, «Step 7» Siemens.
Программный комплекс CoDeSys
Открытость МЭК стандартов привели к созданию фирм занимающихся исключительно инструментами программирования ПЛК.
Наибольшей популярностью в мире пользуются комплекс CoDeSys. CoDeSys разработан фирмой 3S. Это универсальный инструмент программирования контроллеров на языках МЭК, не привязанной к какой-либо аппаратной платформе и удовлетворяющим всем современным требованиям.
Основные особенности:
— полноценная реализация МЭК языков
— встроенный эмулятор контроллера позволяет проводить отладку проекта без аппаратных средств. Причем эмулируется не некий абстрактный контроллер, а конкретный ПЛК с учетом аппаратной платформы
— встроенные элементы визуализации дают возможность создать модель объекта управления и проводить отладку, т.е. дает возможность создавать человеко-машинного интерфейса (HMI)
— очень широкий набор сервисных функции, ускоряющий работу программиста
— существует русская версия программы, и русская документация
Литература:
Современные технологии промышленной автоматизации: учебник / О. В. Шишов. Саранск : Изд-во Мордов. ун-та, 2007. – 273 с. ISBN 5-7103-1123-5
Теги:
- ПЛК
35) Для чего нужны контроллеры и каковы их функции?
- •Часть 1 (лекции Анно е.И.).
- •1) Перечислите основные свойства алгоритмов.
- •2) Для чего нужны блок-схемы?
- •4) Перечислите принципы Фон Неймана.
- •7) Переведите 13425 в десятичную систему счисления.
- •9) Переведите 100111010101102 в шестнадцатеричную систему счисления.
- •10) Что такое формат записи чисел с фиксированной запятой?
- •11) Что такое формат записи числа с плавающей занятой?
- •12) Что такое ascii коды?
- •13) Сколько книг поместится в 4 Гб, если в книге 500 страниц, а на странице 2000 символов?
- •14) Что такое адрес оперативной памяти?
- •15) Перечислите классы машинных команд.
- •16) Где должный размещаться данные, с которыми работает компьютер?
- •17) Для чего нужен генератор тактовьх импульсов?
- •21) Что такое шина компьютера и из чего она состоит?
- •22) В чем разница между шиной и общей шиной?
- •23) Что такое разрядность шины и на что она влияет?
- •25) Почему оперативная память электрическая, а не магнитная?
- •26) Что такое идеология открытых систем при конструировании компьютеров?
- •27) Перечислите функции центрального процессора.
- •28) Перечислите функции устройства управления центрального процессора.
- •29) Перечислите функции арифметико-логического устройства процессора.
- •31) Что такое видеопамять и чем она отличается от остальной оперативной памяти?
- •32) Какую роль в компьютере выполняют порты ввода-вывода?
- •33) Перечислите известные вам периферийные устройства.
- •34) Зачем нужна постоянная память?
- •35) Для чего нужны контроллеры и каковы их функции?
- •36) Что такое интерфейс устройства компьютера?
- •37) Зачем нужды внешние запоминающие устройства?
- •38) Каковы причины структуризации программ и использование подпрограмм?
- •39) Перечислите основные функции оперативной системы.
- •40) Что такое ядро операционной системы и утилиты операционной системы?
- •41) Что такое управление выполнением программ?
- •42) Что такое управление памятью?
- •45) Что такое управление прерываниями? Для чего они нужны?
- •46) Что такое интерфейс операционной системы? Каков интерфейс мs dоs?
- •47) Что такое мультизадачность?
- •49) Что в системе unix называется процессом?
- •50) Как устроена виртуальная память в системе Windows,
- •51) Что такое своппинг?
- •52) Что такое файловая система и для чего она нужна?
- •53) Перечислите функции управления файловой системой.
- •54) Укажите виды и типы компьютеров, и их отличия.
- •57)Перечислите виды сетей.
- •58) Перечислите функции локальных сетей в управлении предприятием.
- •59) Чем сети с централизованным управлением отличаются от одноранговых сетей?
- •60) Приведите примеры серверов различных типов по характеру предоставляемых ими услуг.
- •61) Что понимается под узлом вычислительной сети?
- •63) Что называют коммуникационным протоколом?
- •64) Перечислите известные вам типы соединений в локальных сетях.
- •66) Что включает в себя технология работы сети и чем она обеспечивается?
- •67) Перечислите задачи, которые должны быть решены для качественной передачи данных в сетях.
- •68) Что такое мост, маршрутизатор, шлюз?
- •69) Зачем нужна модель сетевого взаимодействия?
- •70) Перечислите уровни модели открытых систем сетевого взаимодействия.
- •71) Каковы функции канального уровня?
- •72) Каковы функции сетевого уровня?
- •73) Каковы функции транспортного уровня?
- •74) Перечислите базовые типы топологий локальной сети. Чем они принципиально отличаются друг от друга?
- •75) Какие методы доступа используются в сетях Token Ring, Arcnet и Ethernet?
- •76) Что входит в задачу сетевой операционной системы?
- •77) Чем сетевая операционная система отличается от сетевой оболочки? Чем является система NetWare?
- •80) Дайте определение глобальной сети Интернет?
- •81) Перечислите основные принципы лежащие в основе организации Интернета.
- •82) Перечислите основные сервисы Интернета.
- •83) Что такое ftp-передача данных?
- •84) Что такое доступ в режиме удаленного терминала?
- •85) Дайте определение гипертекста?
- •86) Что такое ip-адрес и как он устроен?
- •87) Что такое доменный адрес и как он устроен?
- •88) К каким уровням относятся протоколы tcp, ip, udp, slip, ppp, ftp?
- •89) Перечислите основные функции системного программного обеспечения.
- •90) Как компьютер загружает операционную систему (ос)?
- •91) Основное отличие системы Windows от системы ms-dos?
- •92) Является ли система Windows многозадачной системой?
- •93) Перечислите недостатки программирования непосредственно на машинном языке.
- •94) Что такое Ассемблер?
- •95) Что называется языком программирования высокого уровня?
- •96) Какие преимущества дает использование подпрограмм в языке программирования?
- •98)Какие языки программирования вы знаете?
- •99) В чем заключается основное отличие объектно-ориентированных языков программирования?
- •100)Что такое язык vba для программы Excel?
- •101) Перечислите известные вам объекты и свойства языка vba.
- •Часть 2 (лекции Лугачева м.И.).
- •4. Что такое информационная система (ис)? Приведите пример.
- •5. Что такое информация, данные, знания? Приведите схему их взаимодействия.
- •6. Представьте семиотический подход к анализу информации.
- •7. Опишите меры информации, представьте единицы измерения информации.
- •8. Что характеризует и как измеряется синтаксическая мера информации?
- •9. Что характеризует и как измеряется семантическая мера информации?
- •10. Что характеризует и как измеряется прагматическая мера информации?
- •11. Опишите свойства данных, информации и знаний.
- •12. Экономическая информация. Приведите примеры трансакционной и аналитической информации.
- •13. Изменение концепции информации: от бюрократической обузы до стратегического ресурса.
- •14. Дайте определение системы, подсистемы.
- •15. Представьте ис именно как систему.
- •16. Опишите компоненты ис.
- •17. Информационные технологии, функциональные подсистемы, бизнес-приложения. Определения.
- •18. Информационные технологии (ит), базы данных, функциональные подсистемы (фп). Примеры взаимодействия.
- •19. Что включает в себя управление информационными системами?
- •20. Что важнее: функциональные системы и бизнес-приложения или информационные технологии?
- •21. Зачем нужны ис и какие задачи они решают на стратегическом, управленческом и операциональном уровнях?
- •22. Какие ис работают на разных уровнях структуры организации:
- •23. Приведите примеры ис:
- •24. Перечислите основные типы информационных систем в организациях. Сис, спр, сппр, соз, мис, сот, сао.
- •33. Стратегические информационные системы (сис). Приведите примеры. Чем сис отличаются от сир?
- •34. Что такое кокпит — системы?
- •35. Что такое интеграция и какова ее роль в создании ис?
- •36. Опишите три уровня интеграции в ис.
- •37. Локальные, малые, средние и крупные (erp) ис. Примеры. Отечественные и зарубежные информационные системы, применяемые на разных уровнях иерархии.
- •38. Mrp, mrpii, erp -системы. Определения. Общее и различия в применении.
- •39. Эволюция ис: от мrp к erpii.
- •40. Чем отличаются mrpi1 и erp?
- •41. Чем отличаются erp и erph?
- •42. Приведите определение erp — системы и схему ее использования для планирования работы предприятия.
- •43. Представьте системы scm. Как связаны scm и mrp?
- •44. Представьте системы crm. Чем обусловлен бум внедрения этих систем в последние голы?
- •45. Расскажите о сппр. Основанных на моделях.
- •46. Расскажите о ciiiii’, основанных на данных.
- •47. Расскажите о сппр, основанных на знаниях.
- •48. Расскажите о сппр, основанных на телекоммуникациях.
- •56. Каналы связи: проводные и беспроводные Примеры.
- •57. Спутниковые системы связи.
- •58. Что такое бизнес — приложения, как они связаны с функциональными
- •59. Интегрированные системы управления (ису) и корпоративные информационные системы (кис).
- •60. Приведите пример архитектуры кис на базе sap r/3.
- •61. Что такое цепочка добавления стоимости?
- •62. Дайте определение бизнес-процесса и описание нескольких примеров.
- •Реинжиниринг бизнес-процессов: определение.
- •64. Вендеры и консультанты. Интеграторы. Их участие на различных этапах жизненного цикла ис.
- •65. Мировые лидеры продаж ис.
- •66. Мировые лидеры консалтинга в области ис.
- •67. Какие выгоды дает применение компанией информационной системы для целей планирования и управления?
Зачем нужен контроллер
Так уж получается, что поколения компьютерной техники сменяются очень быстро, и то, что считалось современным 2 года назад, сейчас уже отсталое и снятое с производства. Но что делать потребителю, который не рассчитывает на замену всего комплекса компьютерных устройств каждые 3 года, а хочет всего лишь новый системный блок, оставляя старый принтер, сканер или TV Tuner, и оказывается, что их порты отсутствуют на новом системном блоке или ноуте, потому что считаются устаревшими? А если наоборот: человек на старый системный блок хочет подцепить современную цифровую камеру или несколько USB устройств, а гнёзд не хватает.
Во всех этих случаях помогают самые разнообразные контроллеры. Они бывают как внешние для ноутов, так и в виде плат, вставляемых в PCI порт стандартного ПК. Контроллер — это переходник и разветвитель, если говорить о нём упрощённо. С помощью 1 платы контроллера на старый ПК можно добавить 4-6 USB портов, одни из которых будут находиться на задней планке ПК, а другие будут внутри блока на самой плате контроллера.
Не всегда купленный контроллер будет совместим с Вашим ПК и вполне возможно, что придется его подбирать, меняя на контроллер другого производителя, иначе ПК будет зависать и вытворять другие неприятные вещи.
На большинстве ПК также отсутствует порт 1398, на самом деле тоже являющийся частью USB и используемый многими производителями видеокамер для их подключения к ПК. Такой порт часто используется в контроллерах разветвителях USB совместно с стандартными портами USB.
Также на практически всех современных ПК отсутствует порт LPT, используемый большинством моделей устаревших, но до сих пор работающих, принтеров. Для использования этих портов тоже существуют вставляемые в порт PCI контроллеры, а также внешние контроллеры — переходники с LPT на USB (правда, не всегда срабатывающие).
Так же не забудьте о других переходниках с интерфейсом USB. Это переходники PCI- LPT для настольного ПК или PCMCIA LPT для ноутбука.