Содержание
Рекуперация электрической энергии и ее использование
 Традиционным способом избавления от лишней энергии, выделяемой в преобразователях частоты во время торможения управляемых ими асинхронных двигателей, было рассеивание оной в форме тепла на резисторах. Тормозные резисторы применялись везде, где имела место высокая инерция нагрузки, например в центрифугах, на электротранспорте, на нагрузочных стендах и т. п.
Традиционным способом избавления от лишней энергии, выделяемой в преобразователях частоты во время торможения управляемых ими асинхронных двигателей, было рассеивание оной в форме тепла на резисторах. Тормозные резисторы применялись везде, где имела место высокая инерция нагрузки, например в центрифугах, на электротранспорте, на нагрузочных стендах и т. п.
Такое решение было необходимостью, чтобы ограничить максимальное напряжение на зажимах преобразователей в режиме торможения. Иначе бы частотные преобразователи выходили из строя, ведь было бы невозможно контролировать параметры разгона и торможения.
Тормозные резисторы не обременяли экономически оборудование, но некоторые неудобства за собой неизменно влекли. Резисторы габаритны, сильно разогреваются, нужна защита от влаги и пыли. И все это связано лишь с тем, что нужно рассеять впустую энергию, за которую предприятие платит деньги, и деньги не малые, если тем более речь о крупном производстве.
Летом особенно нежелателен дополнительный нагрев окружающего воздуха, ведь технологическое оборудование и так нагрето теплым воздухом, а тут еще и резисторы, прогретые до 100 градусов и выше. Нужна дополнительная вентиляция — снова расходы.
Но есть и другой путь. Зачем рассеивать энергию впустую? Можно вернуть ее в сеть обратно, и так сэкономить энергозатраты. Тут то и приходят на помощь системы рекуперации электроэнергии.
Безусловно, частотные преобразователи сегодняшнего дня сильно сокращают потребление электричества оборудованием, благодаря оптимизации способа питания двигателей различного технологического оборудования, и это экономит ресурсы. Но применение рекуперации еще более наращивает экономию. Энергия может не рассеиваться на резисторах при торможении, а возвращаться в сеть с учетом текущих параметров сети.
На сегодняшний день ведущие производители промышленных механизмов и оборудования уже внедряют такие системы на электротранспорте: для троллейбусов, электропоездов, эскалаторов, трамваев, наконец — для электрокаров.
Как же работает система рекуперации? Источник переменного тока, питающий двигатель или другую установку, должен суметь принять энергию назад. Для этого вместо обычного выпрямителя применяется преобразователь с широтно-импульсной модуляцией. Такой преобразователь в состоянии направлять потоки мощности как от источника к потребителю, так и от потребителя к источнику. Данный путь позволяет довести коэффициент мощности до единицы.
Типичный IGBT-каскад частотного преобразователя, работающий в режиме рекуперации, сначала представляется как выпрямитель синусоидального тока, однако при торможении он генерирует сигнал с широтно-импульсной модуляцией, при котором направление тока, при напряжении на зажимах выше определенного уровня, оказывается направленным не от сети, а к сети из цепи потребителя.
Разница напряжений питающей сети и цепи нагрузки прикладывается к рекуперационному индуктору. Индуктивность блокирует высокочастотные гармоники, и получается почти чистый синусоидальный ток, здесь не требуется синхронизирующего оборудования, достаточно подать три тестирующих импульса от ШИМ-модулятора в сеть, чтобы определить частоту и фазу напряжения в текущий момент.
Примером могут служить частотные преобразователи с системой рекуперации фирмы Control Techniques, которые служат в частности на заводах Lamborghini и Nissan для питания стендов динамических испытаний, а также на эскалаторах и в различных металлургических решениях.
Суть везде одна и та же — создается двунаправленный поток энергии как к потребителю из сети, от источника, так и из потребителя к сеть. При проектировании рекуперационных систем учитывают рад факторов: диапазон сетевого напряжения, номинал оборудования и коэффициент мощности, максимальная мощность с учетом перегрузки, уровень потерь.

Схема, приведенная на рисунке, демонстрирует одномоторное решение, где привод двигателя и привод рекуператора представлены каждый в одном экземпляре, их номиналы равны. Но порой случаются перегрузки двигателя, и тогда требуется более мощный привод рекуперации, дабы покрыть нижний предел по напряжению и потери в двигателе.
По такому же принципу обеспечивается работа нескольких двигателей с несколькими моторными приводами, при этом ставится один мощный привод рекуперации, способный пропустить через себя суммарную мощность для всех двигателей системы с учетом возможности одновременного торможения всех двигателей.

Для ограничения пускового тока в системах с несколькими двигателями, когда шины постоянного тока объединены, применяют тиристорные модули, подключаемые при помощи контакторов к заряжаемым постоянным током конденсаторам преобразователя. После заряда конденсаторов тиристорный модуль отключается. Очевидно, системы рекуперации конфигурируются по разному, и проектируются индивидуально.
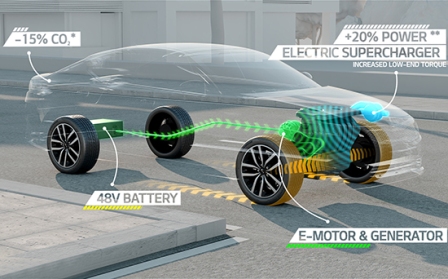
Говоря о рекуперации, нельзя не вспомнить о системах рекуперативного торможения, применяемых в современных гибридных двигателях автомобилей, где основой служит путь электрической рекуперации кинетической энергии.
Всегда, когда автомобиль движется, проявляется кинетическая энергия. Но при торможении в традиционном виде, избыток энергии просто теряется в форме тепла, тормозные колодки трутся о тормозные диски, расходуя кинетическую энергию впустую, нагревая фрикционный материал и металл, отдавая тепло в конечном итоге окружающему воздуху. Это очень расточительный подход.
Система рекуперативного торможения не расходует кинетическую энергию просто на трение, чтобы затормозить. Вместо этого используется включенный в трансмиссию электродвигатель, который начинает при торможении работать как генератор, преобразовывая момент на валу в электроэнергию, заряжающую аккумуляторную батарею, а тормозящий момент ротора, возникающий в генераторном режиме, как раз и дает автомобилю желанное торможение. Запасенная в аккумуляторе таким образом энергия через некоторое время вновь служит для движения автомобиля, то есть используется повторно.
Рекуперативное торможение позволяет по максимуму использовать доступный ресурс каждого заряда аккумулятора, и топливо сильно экономится. Поскольку при торможении 70% кинетической энергии приходится на переднюю ось, то и систему рекуперации монтируют именно на передней оси, чтобы более эффективно сохранять энергию.
Наибольшая эффективность рекуперативного торможения достигается на высоких скоростях движения, а при низких скоростях эффективность системы падает. По этой причине наряду с рекуперационным торможением так или иначе фрикционная тормозная система присутствует. Совместная работа двух систем обеспечивается электронным контроллером.
Контроллер реализует ряд функций: контролирует скорость вращения колес, поддерживает правильный тормозящий момент, распределяет тормозное усилие между рекуперационным и фрикционным тормозом, поддерживает приемлемый для оптимального заряда батареи крутящий момент.
Разумеется, прямой механической связи между педалью тормоза и фрикционными колодками в таких автомобилях нет. Электронный блок обеспечивает правильное взаимодействие ABS, системы курсовой устойчивости, системы распределения тормозных усилий и усилителя экстренного торможения между собой.
Андрей Повный
Рекуперативное торможение
Toyota Prius 2004 — серийный (с 1997) автомобиль с системой рекуперативного торможения У этого термина существуют и другие значения, см. Тормоз.
Рекуперати́вное торможе́ние (от лат. recuperatio «обратное получение; возвращение») — вид электрического торможения, при котором электроэнергия, вырабатываемая тяговыми электродвигателями, работающими в генераторном режиме, возвращается в электрическую сеть.
Рекуперативное торможение широко применяется на электровозах, электропоездах, современных трамваях и троллейбусах, где при торможении электродвигатели начинают работать как электрогенераторы, а вырабатываемая электроэнергия передаётся через контактную сеть либо другим электровозам, либо в общую энергосистему через тяговые подстанции.
Аналогичный принцип используется на электромобилях, гибридных автомобилях, где вырабатываемая при торможении электроэнергия используется для подзарядки аккумуляторов. Некоторые контроллеры двигателей электровелосипедов реализуют рекуперативное торможение.
Проводились также эксперименты по организации рекуперативного торможения других принципов на автомобилях; для хранения энергии использовались маховики, пневматические аккумуляторы (англ.), гидроаккумуляторы и другие устройства.
Использование в автомобилестроении
Использование на легковых и грузовых автомобилях
С развитием рынка гибридных и электроавтомобилей система рекуперации зачастую используется для увеличения дальности пробега автомобиля на электрическом заряде. Наиболее распространенными автомобилями этих классов является Toyota Prius, Chevrolet Volt, Honda Insight, Tesla Model S,3,X,Y
Есть отдельные случаи применения системы рекуперации в автомобиле с привычным бензиновым двигателем для сокращения расхода топлива. Такая система разрабатывалась на а/м Ferrari для обеспечения функционирования внутренних мультимедийных и климатических систем автомобиля от отдельной батареи, заряжаемой рекуперируемой энергией.
Система рекуперации энергии при торможении для электромобилей и электровелосипедов подвергается критике. Тормозной путь автомобиля очень мал по сравнению с проезжаемым путём и составляет от нескольких метров до несколько десятков метров (водитель обычно относительно резко тормозит у самого светофора или места назначения, или вообще подъезжает к месту назначения накатом). За такое короткое время аккумуляторы не успевают сколь-нибудь значительно зарядиться рекуперативным током, даже в городском цикле при частых торможениях. Экономия энергии за счёт рекуперации в лучшем случае составляет доли процента, и поэтому система рекуперативного торможения электромобиля неэффективна и не оправдывает усложнения конструкции. К тому же рекуперативное торможение не освобождает от необходимости обычной колодочной тормозной системы, так как на малых оборотах двигателя в режиме генератора его противо-ЭДС мала и недостаточна для полной остановки автомобиля. Также рекуперативное торможение не решает проблему стояночного тормоза (за исключением искусственного динамического удержания ротора на месте, на что расходуется значительная энергия). В современных электромобилях имеется возможность настройки педали «газа» — при её отпускании электромобиль либо продолжает двигаться по инерции накатом, либо переходит в режим рекуперативного торможения.
Однако рекуперация эффективна для электротранспорта с его частыми участками разгона-торможения, где тормозной путь большой и соизмерим с расстоянием между станциями (метро, пригородные электропоезда).
Использование в автоспорте
В сезоне 2009 года в Формуле-1 на некоторых болидах использовалась система рекуперации кинетической энергии (KERS). Рассчитывалось, что это подстегнёт разработки в области гибридных автомобилей и дальнейшие совершенствования данной системы.
Впрочем, у Формулы-1 с её мощным двигателем разгон на малых скоростях ограничивается сцеплением шин, а не крутящим моментом. На высоких же скоростях использование KERS не столь эффективно. Так что по результатам сезона-2009 оснащённые данной системой болиды не демонстрировали превосходства над соперниками на большинстве трасс. Однако это может объясняться не столько неэффективностью системы, сколько трудностью её применения в условиях строгих ограничений на вес машины, действовавших в 2009 году в Формуле-1. После соглашения команд не использовать KERS в 2010 году для сокращения издержек, в сезоне 2011 года использование системы рекуперации было продолжено.
По состоянию на 2012 год на систему KERS налагаются следующие ограничения: передаваемая мощность не более 60 кВт (около 80 л.с.), ёмкость хранилища не более 400 кДж. Это означает, что 80 л.с. можно использовать не более 6.67 с на круг за один или несколько раз. Таким образом, время круга можно уменьшить на 0.1-0.4 с.
Техническим регламентом Формулы-1, утверждённым FIA на 2014 год, предусмотрен переход на более эффективные турбомоторы со встроенной системой рекуперации (ERS). Применение двойной системы рекуперации (кинетической и тепловой) в сезонах 2014—2015 годов стало гораздо более актуально из-за введения жёстких регламентных ограничений на расход топлива — не более 100 кг на всю гонку (в прошлые годы 150 кг) и мгновенный расход не более 100 кг в час. Неоднократно можно было наблюдать, как во время гонки при выходе из строя системы рекуперации машина начинала быстро терять позиции.
Рекуперативное торможение используется также в гонках на выносливость. Такой системой оснащены спортпрототипы класса LMP1 заводских команд Audi R18 и Toyota TS050 Hybrid, Porsche 919 Hybrid.
Использование на железных дорогах
Основная статья: Электрическое торможение
Рекуперативным торможением на железнодорожном транспорте (в частности, на электровозах и электропоездах, оборудованных системой рекуперативного торможения) называется процесс преобразования кинетической энергии движения поезда в электрическую энергию тяговыми электродвигателями (ТЭД), работающими в режиме генераторов. Выработанная электрическая энергия передается в контактную сеть (в отличие от реостатного торможения, при котором выработанная электрическая энергия гасится на тормозных резисторах, то есть преобразовывается в тепло и рассеивается системой охлаждения). Рекуперативное торможение используется для подтормаживания состава в случаях, когда поезд идет по относительно некрутому уклону вниз, и использование воздушного тормоза нерационально. То есть, рекуперативное торможение используется для поддержания заданной скорости при движении поезда по спуску. Данный вид торможения дает ощутимую экономию энергии, так как выработанная электрическая энергия передается в контактную сеть и может быть использована другими локомотивами на данном участке контактной сети.
Рекуперативное торможение имеет следующие проблемы, которые требуют особого учета при разработке схемы электровоза для их решения:
а) тормозной момент пропорционален не скорости, а разности между скоростью и «скоростью нейтрали», зависящей от настройки системы управления электровоза и напряжения контактной сети. Так, при скорости ниже нейтрали ТЭДы будут тянуть, а не тормозить. Таким образом, при скорости вблизи нейтрали даже небольшие (в процентах) скачки напряжения сети сильно меняют упомянутую разность, а с ней и момент, и приводят к рывкам. Правильное проектирование схемы электровоза снижает этот фактор.
б) при параллельном включении якорей рекуперирующих ТЭД схема может получиться неустойчивой при боксовании и склонной к «сваливанию» в режим, когда один ТЭД работает в моторном режиме, питаясь от второго ТЭДа, работающего как генератор, что подавляет торможение. Решение: включение обмоток возбуждения крест-накрест от «чужого» ТЭД (см. схемы ВЛ8 и ВЛ10).
в) необходимы меры защиты против короткого замыкания контактной сети или на самом электровозе. Для этого используются быстродействующие контакторы, срабатывание которых вызывает в схеме переходный процесс, перемагничивающий обмотки возбуждения ТЭД и ликвидирующий таким образом остаточную намагниченность статора (возбуждения генерации от которой может быть вполне достаточно для перегрева или пожара в случае КЗ в сети).
Ранее рекуперативным торможением оборудовались электровозы постоянного тока ввиду простоты метода переключения ТЭДов в режим генератора (в СССР схема появилась ещё на сурамском поколении электровозов, например, ВЛ22 и с незначительными изменениями применялась до ВЛ11 включительно, в ней решены все три описанные выше проблемы). В электровозах переменного тока существует проблема, которая заключается в преобразовании выработанного постоянного электрического тока в переменный и синхронизация его с частотой тягового тока, эта проблема решается с помощью тиристорных преобразователей. Электровозы переменного тока, созданные до использования тиристорных инверторов (ВЛ60, ЧС4 и ЧС4Т, а также все поколения ВЛ80, кроме ВЛ80Р) не имели возможности рекуперативного торможения.
Рекуперативное торможение редко используется в пассажирском движении, по крайней мере на «классических» до-тиристорных электровозах вроде ВЛ10 и ВЛ11 из-за возникновение ощутимых рывков при переключении тормозной рукоятки локомотива со ступени на ступень, а также при скачках напряжения контактной сети. Большинство пассажирских локомотивов той поры вовсе не имели этой возможности.
Кроме того, рекуперативное торможение, как и реостатное, сжимает состав и создает удар от сжатия сцепных устройств.
Тем не менее рекуперативное торможение широко применяется на моторвагонном подвижном составе (МВПС) постоянного тока (ЭР2Р, ЭР2Т и более поздние электропоезда). В отличие от поездной работы, в МВПС обычно постоянен вес поезда (его почти никогда не переформируют), а также намного выше тяговооружённость. Это сильно упрощает создание автомата управления рекуперативным торможением. Применяется и в грузовых локомотивах, к примеру на 2ЭС6.
Рекуперативное торможение на постоянном токе требует переоборудования тяговых подстанций. Как минимум возможно рассеяние энергии на стационарных резисторах в случае изменения направления тока в фидерах ПС (при этом сохраняется возможность использования энергии рекуперации для тяги другого поезда на этом же участке, что важно при тяжелом профиле пути). Как максимум — необходима установка инверторов.
Рекуперативное торможение на железнодорожных локомотивах может использоваться также для подтормаживания в экстренных аварийных случаях при отказе воздушного тормоза. В частности, имеются сведения о неоднократном применении машинистами рекуперативного торможения на крутом участке Ерал — Симская (Челябинская область). Следует отметить, что штатное экстренное торможение на локомотивах производится стравливанием воздуха (стоп-кран в пассажирских вагонах), а при полном отсутствии в системе воздуха тормоза блокируются.
Рекуперативное торможение двигателя постоянного тока
- •Основы теории электропривода введение
- •Тема лекции 1 Основные понятияэлектропривода план лекции
- •1.1. Структурная схема электропривода
- •2. Классификация электроприводов
- •Тема лекции 2 Силы и моменты, действующие в системе электропривода план лекции
- •Виды статических моментов (активный и реактивный)
- •Приведение статических моментов к валу электродвигателя
- •Расчёт мощности электродвигателя упрощенного электропривода лебёдки
- •Приведение моментов инерции к одной оси вращения
- •Приведение масс, движущихся поступательно, к валу двигателя
- •Тема лекции 3
- •Уравнение движения электропривода
- •Время пуска двигателя в холостом режиме и под нагрузкой
- •Пуск двигателя в холостом режиме
- •Пуск двигателя под нагрузкой
- •Время торможения и изменения скорости электропривода Разгон двигателя от скорости до
- •Свободный выбег
- •Время торможения электропривода
- •Время изменения скорости электропривода
- •Путь рабочего органа за время пуска и торможения
- •Тема лекции 4 Механические характеристики исполнительных механизмов. Установившиеся режимы план лекции
- •Момент и мощность вращательного движения
- •Изображение характеристики механизмов в теории электропривода
- •Различают два основных вида механических характеристик судовых исполнительных механизмов:
- •Статические моменты судовых механизмов
- •Изображение характеристик исполнительного механизма при работе в электроприводе с разными двигателями
- •Режими роботи електродвигунів у квадрантах системи координат кутова швидкість — момент ω (m)
- •Тема лекции 5 Передача механической энергии при подъёме и спуске груза план лекции
- •Подъем груза
- •Тормозной режим (спуск груза)
- •Построение нагрузочных диаграмм
- •Сопоставление формул вращательного движения с формулами поступательного движения
- •Тема лекции 6
- •План лекции
- •Задачи выбора электродвигателя (эд)
- •Выбор рода тока и напряжения эд
- •Типы двигателей в зависимости от назначения
- •Выбор номинальной скорости эд
- •Выбор двигателя по мощности
- •Тема лекции 7 Нагревание и охлаждение электродвигателей план лекции
- •Классификация изоляции
- •Тепловой баланс и превышение температуры электродвигателей
- •Постоянные времени нагрева и охлаждения
- •План лекции
- •Международная система классификации режимов работы электродвигателей
- •Продолжительный режим s1
- •Кратковременный режим s2
- •Повторно–кратковременный режим s3
- •Условия выбора электродвигателей для судовых электроприводов
- •Расчет мощности и выбор электродвигателя для различных режимов работы
- •Номинальная мощность электродвигателя при длительной переменной нагрузке
- •Метод средних потерь
- •Метод эквивалентных величин (тока, момента, мощности)
- •Расчет мощности и выбор электродвигателя для повторно-кратковременного и кратковременного режимов работы
- •Расчет мощности и выбор электродвигателя для кратковременного режима
- •Тема лекции 10 Механические характеристики электродвигателей план лекции
- •1.Естественные и искусственные механические характеристики электродвигателей
- •Естественная механическая характеристика синхронного двигателя
- •Естественная механическая характеристика двигателя постоянного тока
- •Естественная механическая характеристика асинхронного двигателя
- •Тема лекции 11 Саморегулирование электродвигателей план лекции
- •Изменение скорости электродвигателей
- •Саморегулирование электродвигателей постоянного тока
- •Саморегулирование асинхронных двигателей (ад)
- •Равновесие моментов устанавливается при новом значении скорости вращения вала эд.
- •Процесс саморегулирования асинхронных двигателей при увеличении момента сопротивления механизма
- •Активная и реактивная составляющие тока в асинхронном двигателе
- •Тема лекции 12 Устойчивость работы электропривода план лекции
- •Статическая устойчивость электропривода
- •Влияние эксплуатационных характеристик электродвигателя на cтатическую устойчивость
- •Динамическая устойчивость электропривода
- •Влияние величины напряжения сети на устойчивость электропривода. Опрокидывание электродвигателя
- •Способы повышения динамической устойчивости саэп
- •Контрольные вопросы
- •Способы пуска, регулирования частоты вращенияи торможения электроприводов
- •Способы регулирования частоты вращения электродвигателей постоянного тока
- •2.1. Основные сведения
- •Электрическое торможение двигателей постоянного тока
- •3.1. Основные сведения
- •Динамическое торможение двигателя параллельного возбуждения
- •Рекуперативное торможение двигателя постоянного тока
- •Реверс двигателей постоянного тока
- •4.1. Основные сведения
- •4.2. Реверс изменением направления тока в обмотке якоря
- •Реверс изменением направления тока в параллельной обмотке возбуждения
- •Тема лекции 14
- •Прямой пуск короткозамкнутых асинхронных двигателей специального исполнения
- •Реостатный пуск двигателей с фазным ротором
- •Пускасинхронного двигателя при пониженном напряжении на обмотке статора
- •Введение сопротивления в цепь статора
- •Тема лекции 16 Способы регулирования частоты вращения 3-фазных асинхронных двигателей план лекции
- •Основные сведения
- •Регулирование скорости изменением числа пар полюсов обмотки статора. Принцип получения разного числа пар полюсов
- •Регулирование скорости асинхронного двигателя изменением числа пар полюсов путем переключения обмотки статора со «звезды» на «двойную звезду»
- •Расчёт момента и мощности при регулирование скорости переключением обмоток статора со звезды(y) на двойную звезду(yy)
- •Регулирование скорости асинхронного двигателя изменением числа пар полюсов путем переключения обмотки статора с «треугольника» на «двойную звезду»
- •Расчёт момента и мощности при регулирование скорости переключением обмоток статора с треугольника на двойную звезду(yy)
- •Регулирование скорости асинхронного двигателя изменением частоты тока статора
- •1.Статический момент не изменяется с изменением скорости
- •Статический момент нагрузки изменяется по квадратичному закону
- •§ 5.13. Системы частотного регулирования асинхронных двигателей
- •21.10.2010 18:37 Администратор
- •Тема лекции 17 Электрическое торможение асинхронных двигателей
- •3.1. Основные сведения
- •Рекуперативное торможение
- •Рекуперативное торможение при переходе с большей скорости на меньшую
- •Динамическое торможение асинхронных двигателей
- •Торможение асинхронных двигателей противовключением
- •Реверс 3-фазных асинхронных электродвигателей
- •Условия работы судового электрооборудования. Требования Правил Регистра к судовому электрооборудованию
- •Требования морских нормативных документов к конструкции судового электрооборудования
- •Основные сведения
- •Классификация судового оборудования в зависимости от климатических условий района плавания
- •Классификация электрооборудования в зависимости от места расположения на судне
- •Степень защищенности электрооборудования от попадания внутрь воды
- •Зависимость степени защищённости электрооборудования от типа судовых помещений
- •Классификация судового оборудования в зависимости от особых условий работы эксплуатации
- •Классификация судового электрооборудования в зависимости от способа монтажа электрических машин
- •Примеры условного обозначения форм конструктивного исполнения электрических машин
Асинхронная машина, в принципе, как и все электрические машины, является обратимой. Это значит, что она может работать как в режиме двигателя, выполняя какую-то полезную работу, так и в режиме генератора – вырабатывая электрическую энергию.
Если к валу асинхронного электродвигателя приложить момент нагрузки, то преодолевая этот момент, машина будет потреблять энергию из сети. При работе на холостом ходу будет потребляться только энергия, необходимая для покрытия механических потерь в самой машине. Если к валу асинхронной машины подсоединить еще один электродвигатель и с его помощью вращать асинхронную машину, то потери в роторе будут компенсированы за счет приводного двигателя, а в случае, если скорость вращения вала асинхронной машины превысить синхронную частоту вращения (скорость вращения магнитного поля статора), то начнется рекуперация энергии в сеть. Давайте более подробно рассмотрим процесс рекуперации энергии в сеть.
При работе машины в двигательном режиме вращающееся магнитное поле пересекает проводники роторной и статорной обмотки в одинаковом направлении, следствием чего становится совпадение ЭДС статора Е1 и ротора Е2 по фазе. При переходе асинхронника в режим рекуперативного торможения магнитное поле пересекает проводники статора в прежнем направлении, а вот роторные проводники при n>n0 – в противоположном. При этом ЭДС ротора изменит свой знак на обратный и будет равна:
![]()
Соответственно ток ротора:

Отсюда следует, что при переходе в режим рекуперации направление изменит только активная составляющая роторного тока, реактивная не поменяет свое направление. Активный ток поменяет направление из-за изменения направления момента асинхронной машины, по сравнению с двигательным режимом.
Векторная диаграмма асинхронного электродвигателя в генераторном режиме:

Векторная диаграмма показывает, что между U и I1 угол сдвига фазы φ1>(π/2), что будет соответствовать режиму, в котором первопричиной появления тока I1 будет не напряжение питающей сети, а ЭДС Е1. Таким образом, статорная обмотка работает в режиме генератора, отдавая энергию в сеть.
Такие же выражения возможно получить и с помощью эквивалентной схемы. Активная составляющая роторного тока будет равна:

Это значит, что при ω>ω0, скольжение s изменит знак, соответственно поменяет знак I2a/, что значит переход машины в режим рекуперативного торможения. Это подтверждает и выражение электромагнитной мощности:

Данное выражение показывает, что при переходе в режим рекуперативного торможения мощность электромагнитная изменяет свой знак, что означает отдачу мощности вторичным контуром.
Обратившись к выражению мощности вторичного контура:

Из этого выражения мы можем увидеть, что знак реактивной мощности будет сохранятся независимо от режима работы.
Это значит что – асинхронный электродвигатель в рекуперативном режиме тоже потребляет реактивную мощность. И чтоб осуществить рекуперацию, необходим источник реактивной мощности, который необходим для создания вращающегося магнитного поля.
Рекуперативное торможение часто используют в подъемно-транспортных механизмах, при спуске тяжелых грузов. Груз, который опускается, развивает на валу машины отрицательный момент и скорость становится n>n0. Таким образом, машина переходит в режим рекуперативного торможения и тем самым создает тормозной момент на валу. В точке пересечения характеристики со значением статического момента скорость двигателя устанавливается, и груз опускается с постоянной скоростью, как это показано ниже:

тормозной момент будет отсутствовать в том случае, если момент на валу машины будет больше, чем критический момент этой же машины.
Рекуперативное торможения при наличии на валу асинхронной машины реактивного статического момента возможно только при наличии преобразователя частоты или двигателя, с переключающимся числом пар полюсов. Рассмотрим для двигателя с переключающимся числом пар полюсов.
Если обмотки статорные двигателя, работающего на высокой скорости
То есть число пар полюсов меньше, переключить на большее число пар полюсов р1, то в таком случае скорость вращения вала асинхронной машины станет больше, чем синхронная скорость, соответствующая новому числу полюсов
Машина перейдет в режим генератора:
На рисунке, область рекуперативного торможения соответствует участку BCD на механической характеристике.
Довольно часто такой способ применяют в металлорежущих станках, в которых применяю асинхронные машины с переключающимся количеством пар полюсов.