Содержание
- Преимущества и недостатки реактивного двигателя
- Гидравлическая система синхронного хода нескольких гидроцилиндров
- Регулирование синхронного ходе по принципу дозирования
- Устройство синхронного двигателя
- Как работает синхронный двигатель
- Схема запуска двигателя и его регулировка
- Различия синхронных и асинхронных двигателей
Преимущества и недостатки реактивного двигателя
Одним из существенных преимуществ ракеты является то, что в отличие от всех других транспортных средств она может двигаться, не взаимодействуя ни с какими другими телами, кроме продуктов сгорания топлива, содержащиеся в ней самой. В то время как обычные самолеты и даже самолеты с воздушно-реактивными двигателями могут летать только в пределах земной атмосферы, реактивный двигатель баллистической ракеты может работать и в без воздушном пространстве. Другое преимущество — возможность маневрирования корабля в космическом пространстве и торможения его, благодаря изменению направления выброса струи газа.
О недостатках. Если даже предположить мгновенное выброс газов из сопла ракеты и вычислять ее установившуюся скорость , то для достижения скорости ракеты, например, в 4 раза большей от скорости газа, который вырывается, топливная масса должна быть в 4 раза больше от массы оболочки, есть оболочка должна составлять пятую часть всей массы ракеты. Не следует при этом забывать, что «полезной» части ракеты является именно ее оболочка.
Расчет скорости ракеты показывает, что для того, чтобы скорость оболочки была в 4 раза больше от скорости газа, масса топлива на старте должно быть не в 4, а в несколько десятков раз больше массы оболочки. Если при этом дополнительно учесть, что во время запуска с Земли на ракету действуют и сила сопротивления воздуха, через которое она должна лететь, и сила тяжести, то можно сделать вывод, что отношение должно быть еще больше.
Другим недостатком реактивных двигателей является относительно малая скорость выброса газов из сопла ракеты, и, таким образом, относительно малая скорость оболочки. Ракеты, созданные сегодня на компьютерах c установленной windows, не позволяют достичь скорости даже 50 км / с. И если бы могли, то с такой скоростью поездки до ближайших звезд продолжались бы миллионы лет. Все это делает даже намек на использование ракет с реактивными двигателями для межзвездных перелетов, а тем более пилотируемых перелетов, бессмысленным занятием. Для таких перелетов требуется принципиально иной тип двигателя, изобретение которого — дело далекого будущего. То есть, реактивные двигатели, такие, какие они есть на текущий момент, можно использовать для перелетов в пределах одной планеты и в пределах одной планетной системы. Когда будет найден двигатель для межзвездных перелетов, на космических кораблях будущего (а особенно на разведывательных лодочках) будут установлены реактивные двигатели — для перелетов на близкие расстояния и маневрирования.
Гидравлическая система синхронного хода нескольких гидроцилиндров
Одним из распространенных способов синхронизации хода гидравлических цилиндров является так называемый «гидравлический боуденовский трос». Правда, применение боуденовского троса в гидравлических системах связано с определенными затратами.
Два гидроцилиндра одинаковых размеров со сплошными поршневыми штоками последовательно подключаются друг к другу. Благодаря этому второй цилиндр повторяет движение первого цилиндра, на который подается давление насоса. Поскольку обе последовательно включенные полости цилиндров столб жидкости только перемещают, ход цилиндров вследствие внутренних, а возможно и внешних утечек, без подпитки может измениться.
Во избежание нежелательных последствий такого изменения хода поршней полость «боуденовского троса» с помощью расположенного справа 4/3-распределителя 2 через каждый ход соединяется кратковременно с магистралью подачи насоса или бака.
Неравномерный ход поршня имеет следующие причины:
а) левый цилиндр первым возвращается в верхнее конечное положение и включает концевой выключатель 3.
Причина: недостаток жидкости между цилиндрами.
Способ устранения: с помощью левого концевика 3 включить магнит а гидравлического распределителя 2. Рабочая жидкость будет поступать в магистраль управления до тех пор, пока правый цилиндр также не включит концевой выключатель. Магнит а снова отключается.
б) Правый цилиндр первым возвращается в верхнее конечное положение и включает концевой выключатель 4.
Причина: избыток жидкости между цилиндрами.
Способ устранения: с помощью правого концевика 4 включить магнит b распределителя 2.
Этим открывается гидравлически деблокируемый обратный клапан 5 и жидкость стекает до тех пор, пока левый цилиндр также не займет конечное положение.
С помощью левого концевого выключателя 3 магнит b отключается. В этом случае синхронность хода поршня зависит не только от количества жидкости между цилиндрами, но и от точности исполнения обоих цилиндров.
Общеизвестен тот факт, что в технике невозможно изготовить две абсолютно одинаковые детали.
Поскольку подпиточный распределитель 2, как правило, имеет золотниковую конструкцию, возникает определенная утечка.
Поэтому необходимым условием надежной работы всей системы является установка седельного обратного клапана 5.

Регулирование синхронного ходе по принципу дозирования
На принципиальной схеме изображена система регулирования синхронного хода одного из валиков трехвалкового гибочного пресса. На схеме изображены два нижних валка, регулируемых в горизонтальном направлении. Верхний валик регулируется вертикально.
Регулирование синхронного хода осуществляется в обоих направлениях и обеспечивается за счет соединения клапана синхронного хода с подающим трубопроводом перед гидравлическими распределителями 8 и 9. а также путем соединения точек подключения А распределителей со сторонами поршневых штоков соответствующих цилиндров и точек подключения В со сторонами поршней других цилиндров. Обратные дроссельные клапаны 6 и 7 служат для декомпрессии рабочей жидкости при переключении из прессования на обратный ход.
Синхронный ход цилиндров в этой системе обеспечивается за счет того, что рабочая жидкость из опережающего цилиндра поступает во второй цилиндр определенными дозами.
Подача рабочей жидкости в цилиндры 12 и 13 осуществляется отдельно насосами 1 и 2. Таким образом, с самого начала обеспечивается некоторая предварительная дозировка.
Кроме того, в этом случае цилиндры не мешают друг другу.
Дозировка рабочей жидкости происходит через регулирующий клапан 14.
Регулирующий клапан компенсирует разность рабочей жидкости, которая может возникнуть:
- из-за неодинаковой подачи насосов,
- в результате сжатия рабочей жидкости,
- вследствие неодинаковой утечки в приборах,
- в результате люфтов подшипников машины.
Направление движения цилиндров определяется распределителями 8 и 9. Напорные клапаны 10 и 11 при выдвижении цилиндров выполняют функции клапанов противодавления.
Качество работы клапана синхронного хода в основном зависит от работы системы обнаружения ошибок.
Регулирующий клапан, как изображено на принципиальной схеме, включается с помощью балансира 15.
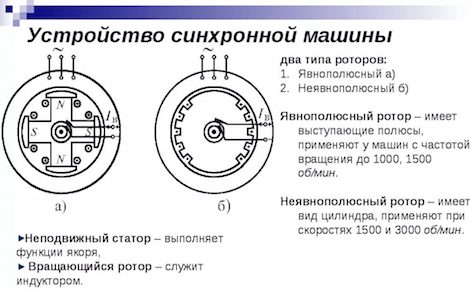
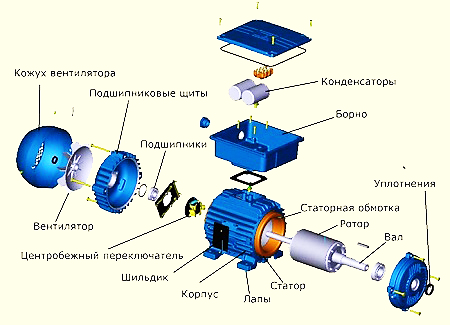
Устройство синхронного двигателя
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.

В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.

Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
Как работает синхронный двигатель
Принцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.

При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
При разгоне используется состояние асинхронного режима, когда происходит замыкание обмоток индуктора с помощью реостата или короткозамкнутым путем, подобно асинхронным машинам. Для того, чтобы осуществлять запуск в таком режиме, ротор оснащается короткозамкнутой обмоткой, которая одновременно является успокоительной обмоткой, способной устранить раскачивание ротора во время синхронизации. После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток.
Таким образом, синхронный двигатель это не только двигатель, но и своеобразный генератор, поскольку у них одинаковое конструктивное исполнение. Схема работы двигателя будет следующей. Обмотка якоря подключается к трехфазному переменному току, а к обмотке возбуждения от постороннего источника подается постоянный ток. Вращающееся магнитное поле, созданное трехфазной обмоткой и поле, созданное обмоткой возбуждения, взаимодействуют между собой. Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
Для двигателей, где установлены постоянные магниты, применяются специальные внешние разгонные двигатели. В отличие от асинхронных устройств, разгон ротора в синхронном двигателе должен достигнуть частоты вращения магнитного поля. Это связано с подачей в обмотку ротора тока из постороннего источника, а не индуцируется в нем под действием магнитного поля статора, следовательно, на него не влияет частота вращения вала. В результате, синхронный двигатель переменного тока приобретает постоянную частоту вращения ротора вне зависимости от нагрузки. Специфический принцип работы этих устройств оказал влияние на их пуск и регулировку частоты вращения.
Схема запуска двигателя и его регулировка
У синхронных двигателей отсутствует начальный пусковой момент. При подключении якорной обмотки к источнику переменного тока, электромагнитный момент дважды изменить свое направление за один период изменения тока. Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.

Таким образом, величина среднего момента в течение одного периода будет иметь нулевое значение. Чтобы увидеть, как работает синхронный двигатель при пуске, нужно выполнить разгон его ротора под действием внешнего момента до вращения с частотой, приближенной к синхронной.
Сам запуск агрегата может производиться разными способами:
- В первом случае используется схема асинхронного включения, основой которой служит глухо подключенный возбудитель. Данный способ применяется при статическом моменте нагрузки ниже 0,4, когда отсутствует падение напряжения. Сопротивление разряда замыкается в обмотке возбуждения, за счет чего исключаются перебои с возбуждением обмотки во время впуска, поскольку незначительная скорость вращения ротора приводит к перенапряжению. Когда скорость становится близкой к синхронной, контактор реагирует на это изменение, в результате происходит переключение обмотки возбуждения из разрядного сопротивления непосредственно на якорь возбудителя.
- Во втором варианте пуска используется тиристорный возбудитель. Этот способ считается более надежным из-за высокого КПД. Управление возбуждением значительно облегчается. Подача возбуждение осуществляется автоматически с помощью электромагнитного реле.
Различия синхронных и асинхронных двигателей
Все электродвигатели переменного тока по принципу действия могут быть асинхронными и синхронными. В первом случае вращение ротора будет медленнее, по сравнению с магнитным полем, а во втором – вращение ротора и магнитного поля происходит с одинаковой скоростью.
В асинхронном двигателе вращающееся переменное магнитное поле создается обмотками, закрепленными на статоре. Концы этих обмоток выведены в общую клеммную коробку. Во избежание перегрева на валу двигателя устанавливается вентилятор. Ротор выполнен из металлических стержней, замкнутых с двух сторон между собой. Он представляет единое целое с валом и получил название короткозамкнутого ротора.
Вращение магнитного поля происходит под действием постоянной смены полюсов. Соответственно, в обмотках изменяется направление тока. На скорость вращения вала оказывает влияние количество полюсов магнитного поля.

Синхронный электродвигатель конструктивно отличается от асинхронных агрегатов. Здесь вращение ротора и магнитного поля происходит с одинаковой скоростью. Напряжение на ротор для зарядки обмоток подается с помощью щеток, а не индуцируется действием переменного магнитного поля. Направление тока в обмотках изменяется одновременно с направлением магнитного поля, поэтому вал синхронного двигателя всегда вращается в одну сторону.